Koren started his robotics research in 1980, by interfacing a 3-DOF self-made robotic-arm to IBM personal computer. In 1985 he published “Robotics for Engineers” which was one of the very first scientific books in robotics, and was translated to Japanese and French by the publisher (McGraw Hill, NY).
The amazing robotics work of Yoram Koren is summarized here:
https://robotics.umich.edu/2016/a-retrospective-on-the-amazing-work-of-prof-yoram-koren/
Koren’s hallmark in robotics is a rich body of highly cited papers in autonomous mobile robots that were demonstrated on the mobile robot CARMEL. CARMEL was equipped with 24 ultrasonic sensors to detect obstacles in real time while it is in-motion.
Highlights of Prof. Koren’s contributions to robotics are summarized here:
http://robotics.umich.edu/wp-content/uploads/2019/03/NewRoboticsarticle-KOREN.pdf
Utilizing CARMEL as an experimental platform, Koren and his former Ph.D. student Borenstein invented autonomous motion algorithms for mobile robots moving towards a target in unstructured environments crowded with unknown objects. They invented the Vector Field Histogram method that is based on a potential field generated by data accumulated from the robot ultrasonic sensors while the robot continuously moves. Their 1991 IEEE paper “The Vector Field Histogram …” [Trans. On Robotics & Automation] has 2,260 citations. (From 2007 to 2015 this paper had 140 citations per year!)
Koren and Borenstein paper “Potential-field Methods …” that was presented by Koren in 1991 at an IEEE R&A conference, has 1,500 citations. (From 2008 to 2015 approximately 100 citations per year.) The high number of citations in recent years of these two papers proves that these papers are still very relevant (25 years after their publication), and indicates an enduring impact of these powerful algorithms for autonomous robots moving at high-speed in unstructured environments. The robot CARMEL garnered the attention of CNN that interviewed Prof. Koren in his mobile robotics lab at Michigan in July, 1988.


Yoram Koren and CARMEL on CNN national program “Ahead.” July 29, 1988
Watch CARMEL on CNN: https://www.youtube.com/watch?v=oQ-1pnm6MPk
Note how CARMEL moves, reasons with incomplete domain knowledge obtained from its ultrasonic sensors, and makes motion decisions on the fly while moving at high speed in real-world environment. The video shows how CARMEL avoids colliding with an obstacle (a box) that unexpectedly pops up. Two U.S. patents were issued on this invention.
In 1992 CARMEL won the 1st Autonomous Mobile Robot Competition sponsored by the Association for the Advancement of Artificial Intelligence, beating nine other mobile robots from lead institutions such as Stanford, MIT, and Carnegie Mellon University. The AAAI competition had two basic elements: Navigation in large unstructured environment, and then object recognition by machine vision. In the autonomous motion part, CARMEL was by far superior to all other competitors!
Robotics Technology Assisting People
Since the early 1980’s Koren has been involved in developing computerized robotic aids for persons with disabilities trying to contribute to their social wellbeing. He applied his knowledge in adaptive control to develop a computerized adaptive knee-prosthesis [140]. He later developed with his Ph.D. student J. Borenstein a mobile robot, the Nursing Robot, to assist bed-ridden persons in bringing them items in the room [141]. The Nursing Robot and the VHF method laid the foundations for the development of the NavChair – a wheelchair equipped with ultrasonic sensors that negotiates obstacles in its way [142, 143]. Next, adaptive algorithms that estimate the user’s ability of reaction to the environment were added to the NavChair, making it thereby the first adaptive wheelchair that its performance is adapted to the users’ ability to control their hand motions as they steered the device with a joystick [155].
Shared-control wheelchair; Navigation belt for the blind
The NavChair control architecture is based on a seamless cooperation of two agents controlling the chair. The agents are the disabled person and the wheelchair controller. For example, if the user has a shaky, unstable hand – it is automatically modeled and stored. When the NavChair is driven along a corridor, the user controls the chair while the obstacle avoidance algorithms avoid collisions. But when the user has to move through a narrow door opening, the NavChair computer takes over the control and transfers the chair safely through the door (in order to avoid collision with the edges of the narrow passage that may happen if a user with a shaky hand tries to move the NavChair through). After passing the door, the control is given back automatically to the person. The general concept is that the disabled person and the chair are two agents that share the control on the movements of the chair. Depending on the environment and the qualifications of the person, the system decides autonomously the level of control that each agent has. The level of control that each agent has depends on the environment and the degree of the user’s disability. This intelligent shared-control invention is protected in a patent on which Koren is a co-inventor.
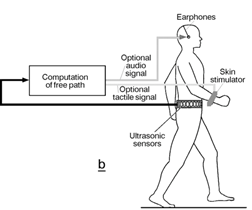
In a different application that was based on the VFH method Koren’s Ph.D. student S. Shoval developed the Navbelt – a user-worn obstacle avoidance device that guides blind users around obstacles by means of audio signals [144, 148, 152].


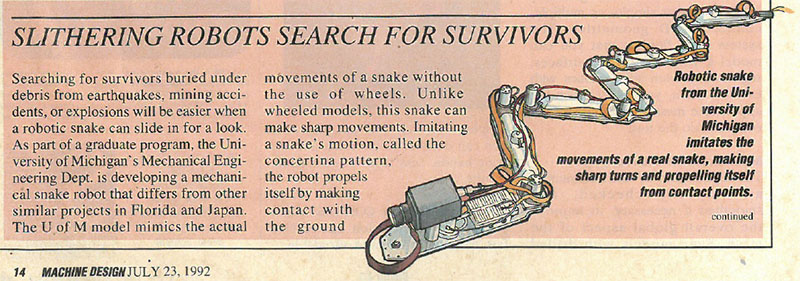
In the early 1990’s with grants from NSF and NASA Koren invented two special robotic devices: The mechanical snake and the inflatable robot. Koren received a grant from the Computer Science Division of NSF to design a mechanical snake that can move without wheels. Koren developed with his Ph.D. student Y. Shan the world-first robotic snake whose movement was remarkably true to life [166]. The structure of the robot enables it to move without wheels. It is constructed of a series of articulated links, each is equipped with a motor and a linear solenoid. Although each link has only one motor, this structure allows the body configuration to be easily controlled thereby enabling the robot to move in very cluttered environments.
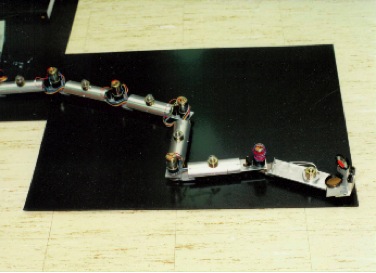
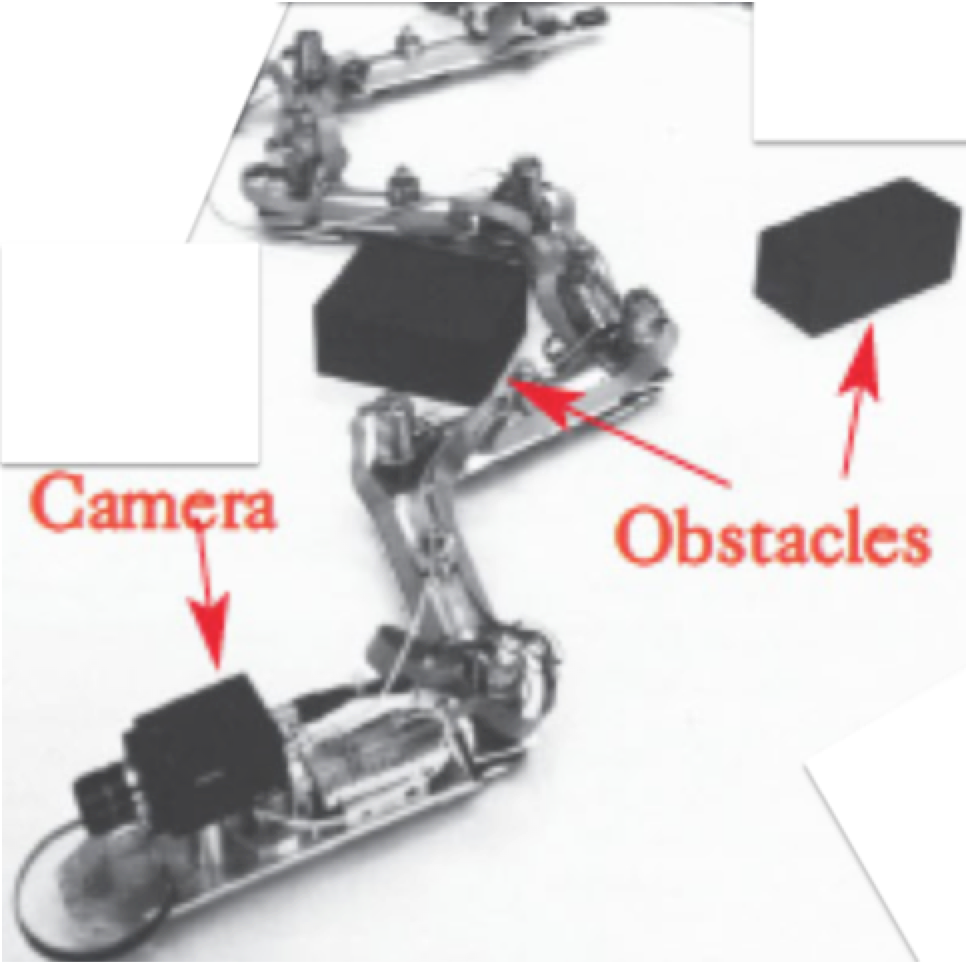
Koren’s Mechanical Snake (1992)
Another world’s-first robot that he built, based on his patent [163], had inflatable arm linkages for deployment in hostile and confined spaces. The inflatable robot is a low-volume and low-weight alternative to rigid arms. The inflatable robot arms can achieve the required load-bearing capacity and rigidity through the appropriate selection of size and pressure. The links of the robot are made of thin film material and are inflatable by air or other gas. The robot can achieve the required load-bearing capacity and rigidity through the appropriate selection of materials, size and pressure. This robot might be useful for surveillance and resource operations, or in areas difficult to access in buildings.
The Inflatable Robot, 1990
Autonomous Guided Vehicles
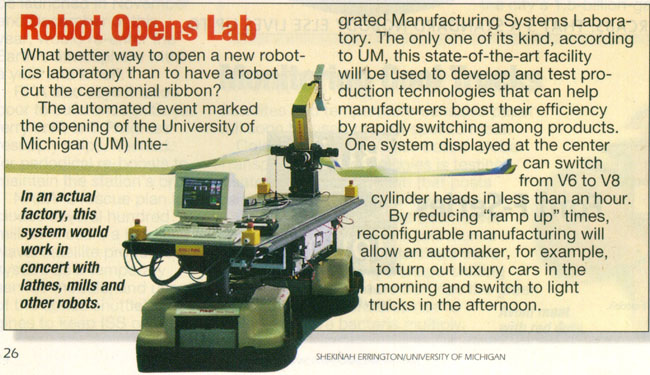
The ERC-RMS designed and built an intelligent, autonomous guided vehicle (AGV) that used the CARMEL obstacle-avoidance algorithms, and could move in a large testbed area, bringing tools and parts where needed, while ensuring safe movement of humans on the floor. It was safe for people to work in the testbed, because this AGV automatically stopped before touching people who moved in the lab.

December 6, 1996: Demonstrating the ERC-RMS Intelligent AGV prototype for industry executives; it was equipped with 24 ultrasonic sensors and utilized the CARMEL obstacle avoidance algorithms.
In the ERC-RMS testbed inauguration ceremony (in which U.S. Senator Spencer Abraham participated), this AGV, which was equipped with large scissors, moved into the lab and cut the ceremonial ribbon. See the photo below, taken from Popular Mechanics [Popular Mechanics; Dec98, Vol. 175 Issue 12, p26]. Note that in this 1998 AGV model the number of ultrasonic sensors was reduced to 6 and they are embedded in the AGV structure; four emergency stop press-bottoms were added at the four corners.